งานที่13 ARDUINO PLANT WATERING SYSTEM
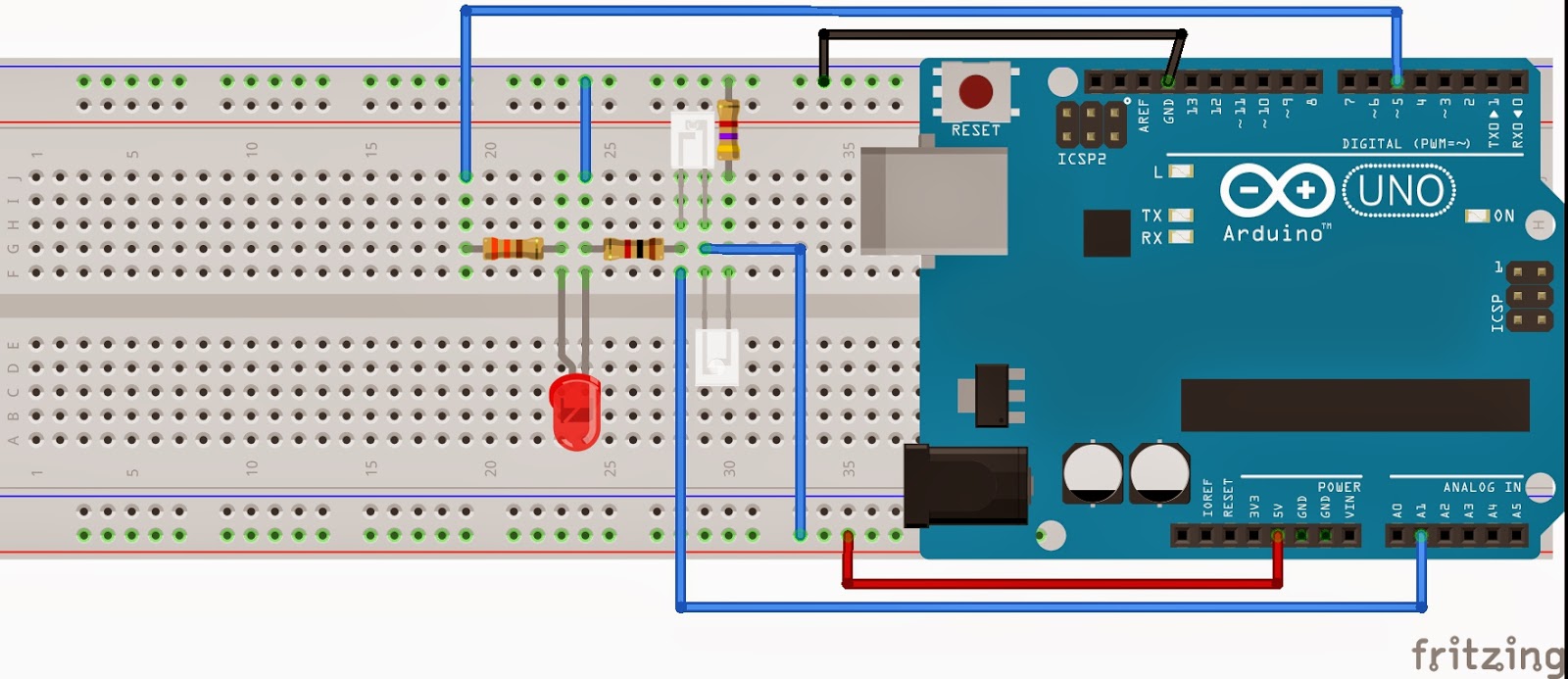
Hardware

Software
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
char auth[] = "YourAuthToken";
char ssid[] = "YourNetworkName";
char pass[] = "YourPassword";
WidgetLED standbyLed(V4);
WidgetLED workingLed(V5);
//Stepper motor pins
#define step1 14 //D5
#define step2 12 //D6
#define step3 13 //D7
#define step4 15 //D8
//Pump pin
#define pump 5 //D9
//Limit switch
#define limitSwitch 4 //D10
int steps = 0 ;
int direction = 0 ;
int totalStaps = 0 ;
int stepsCount = 0 ;
//Data from Blynk App
int onOffTimer = 0 ;
int test = 0 ;
int timerState1 = 0 ;
int timerState2 = 0 ;
int pumpPower = 0 ;
int distance = 0 ;
int instantWatering = 0 ;
int limitSwitchState = 0 ;
void setup()
{
Serial.begin(9600);
Blynk.begin(auth, ssid, pass);
//Stepper motor
pinMode(step1, OUTPUT);
pinMode(step2, OUTPUT);
pinMode(step3, OUTPUT);
pinMode(step4, OUTPUT);
//Pump
pinMode(pump, OUTPUT);
//Limit switch
pinMode(limitSwitch, INPUT);
stopMotor();
}
void loop()
{
Blynk.run();
stepCalculate(distance) ;
if (onOffTimer == 1){ //Turn on timer
if (timerState1 == 1 || timerState2 == 1){ //Time to watering
standbyLed.off();
workingLed.on();
analogWrite(pump, pumpPower);
goWork(totalStaps);
analogWrite(pump, 0);
backHome();
standbyLed.on();
workingLed.off();
}
}
if (instantWatering == 1){ //Press instantwatering button
standbyLed.off();
workingLed.on();
analogWrite(pump, pumpPower);
goWork(totalStaps);
analogWrite(pump, 0);
backHome();
standbyLed.on();
workingLed.off();
}
if (test == 1){ // Press test button
standbyLed.off();
workingLed.on();
goWork(totalStaps);
backHome();
standbyLed.on();
workingLed.off();
}
}
BLYNK_WRITE(V0) {
onOffTimer = param.asInt();
}
BLYNK_WRITE(V1) {
test = param.asInt();
}
BLYNK_WRITE(V2) {
timerState1 = param.asInt();
}
BLYNK_WRITE(V3) {
timerState2 = param.asInt();
}
BLYNK_WRITE(V6) {
pumpPower = param.asInt();
}
BLYNK_WRITE(V7) {
distance = param.asInt();
}
BLYNK_WRITE(V8) {
instantWatering = param.asInt();
}
void stepCalculate(int distance){
totalStaps = (distance*(4076/4)) ;
}
void backHome(){
limitSwitchState = digitalRead(limitSwitch);
while(limitSwitchState == 0){
stepper(0) ;
delay(1);
limitSwitchState = digitalRead(limitSwitch);
}
stopMotor() ;
limitSwitchState = digitalRead(limitSwitch);
}
void goWork(int totalStaps){
while(stepsCount < totalStaps){
stepper(1);
delay(1);
stepsCount ++ ;
}
stopMotor() ;
stepsCount = 0 ;
}
void stepper(int direction){
for (int x=0; x<1; x++){
Blynk.run();
switch(steps){
case 0:
digitalWrite(step1, LOW);
digitalWrite(step2, LOW);
digitalWrite(step3, LOW);
digitalWrite(step4, HIGH);
break;
case 1:
digitalWrite(step1, LOW);
digitalWrite(step2, LOW);
digitalWrite(step3, HIGH);
digitalWrite(step4, HIGH);
break;
case 2:
digitalWrite(step1, LOW);
digitalWrite(step2, LOW);
digitalWrite(step3, HIGH);
digitalWrite(step4, LOW);
break;
case 3:
digitalWrite(step1, LOW);
digitalWrite(step2, HIGH);
digitalWrite(step3, HIGH);
digitalWrite(step4, LOW);
break;
case 4:
digitalWrite(step1, LOW);
digitalWrite(step2, HIGH);
digitalWrite(step3, LOW);
digitalWrite(step4, LOW);
break;
case 5:
digitalWrite(step1, HIGH);
digitalWrite(step2, HIGH);
digitalWrite(step3, LOW);
digitalWrite(step4, LOW);
break;
case 6:
digitalWrite(step1, HIGH);
digitalWrite(step2, LOW);
digitalWrite(step3, LOW);
digitalWrite(step4, LOW);
break;
case 7:
digitalWrite(step1, HIGH);
digitalWrite(step2, LOW);
digitalWrite(step3, LOW);
digitalWrite(step4, HIGH);
break;
default:
digitalWrite(step1, LOW);
digitalWrite(step2, LOW);
digitalWrite(step3, LOW);
digitalWrite(step4, LOW);
break;
}
if(direction == 0){
steps++ ;
}
if(direction == 1){
steps-- ;
}
if(steps > 7){
steps = 0 ;
}
if(steps < 0){
steps = 7 ;
}
}
}
void stopMotor(){
digitalWrite(step1, LOW);
digitalWrite(step2, LOW);
digitalWrite(step3, LOW);
digitalWrite(step4, LOW);
}


ความคิดเห็น
แสดงความคิดเห็น