งานแก้ไข แยก อธิบายส่วนต่างๆของproject

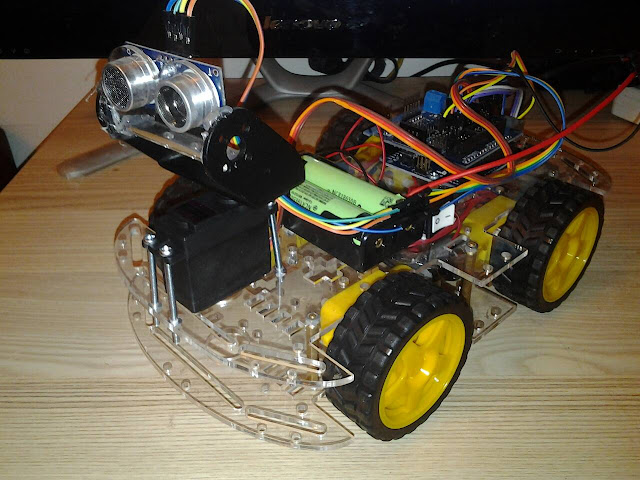
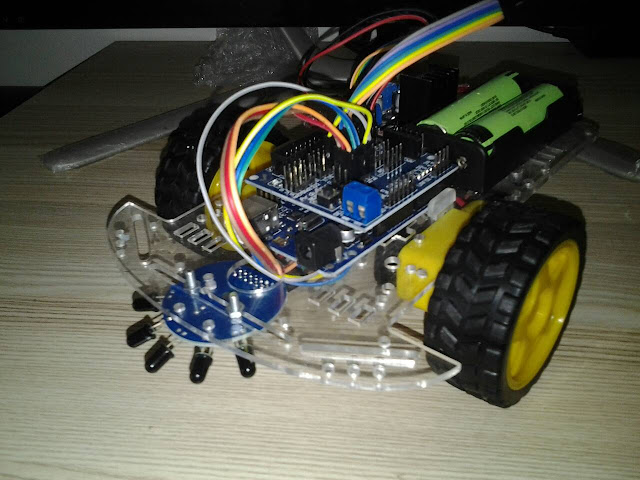
HARDWARE 1.Arduino uno r3 2.bluetooth hc 06 3.2N2222 4.1N4007 5.relay 6.load INPUT 1.bluetooth hc 06 MCU 1.Arduino uno r3 OUTPUT 1.relay 2.load SOFTWARE #include <SoftwareSerial.h> เรียกใช้Library bluetooth const int rxPin = 4; Rx PIN ใช้ขา4 const int txPin = 2; TX PIN ใช้ขา2 SoftwareSerial mySerial(rxPin, txPin); กำหนดค่าลงใน Library bluetooth const int Loads[] = {9, 10, 11, 12}; กำหนด ตัวแปร อาเรย์ int state = 0; ...