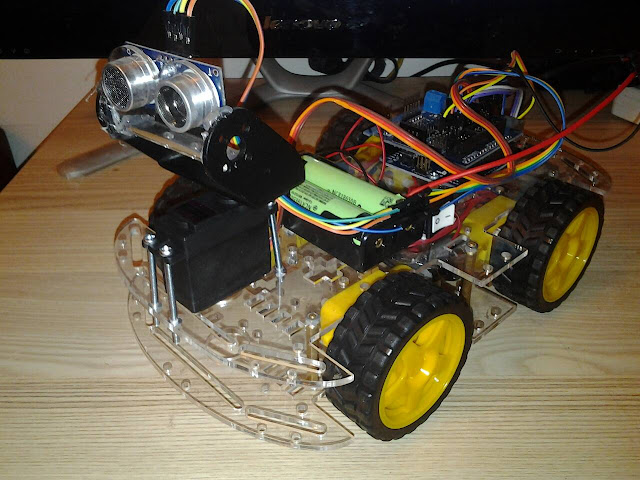
งานที่ 20 หุ่นยนต์ติดตามวัตถุ Ultrasonic
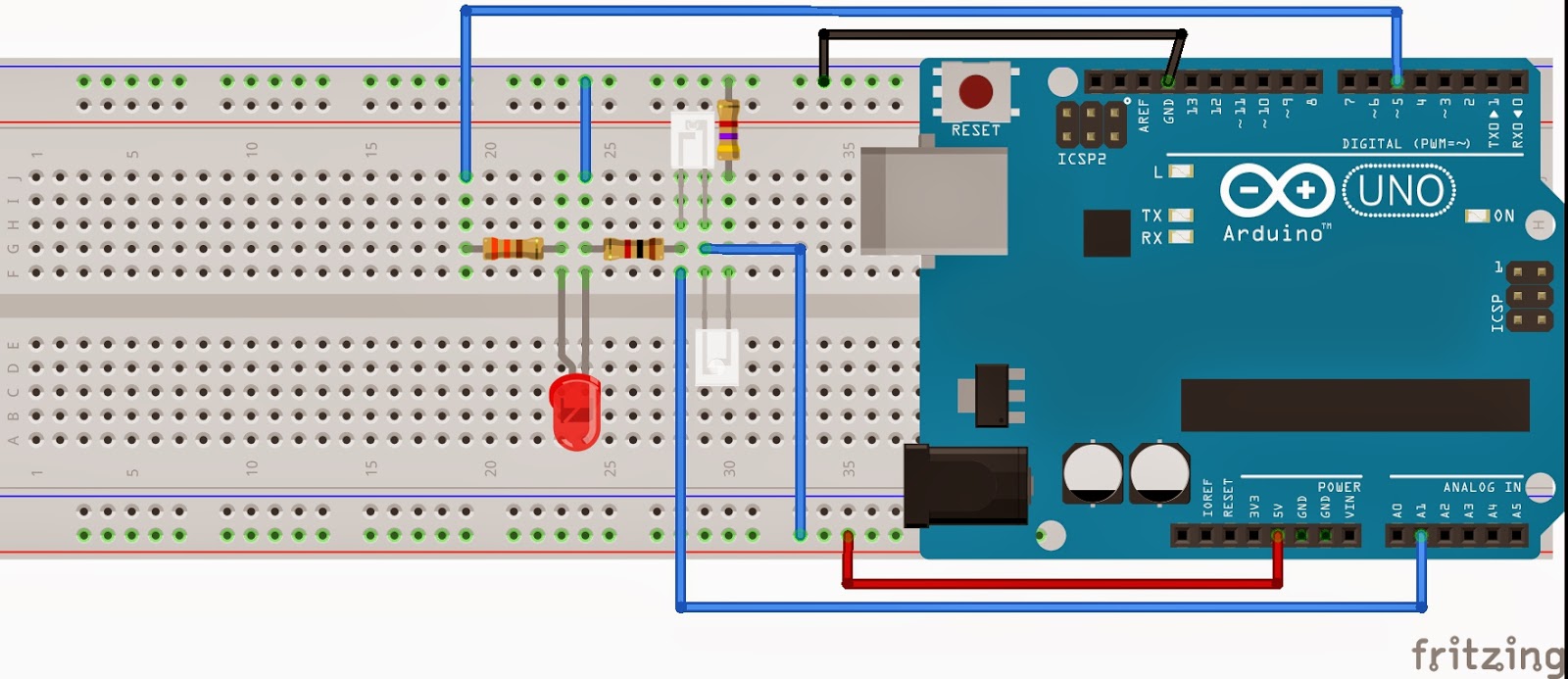
HARDWARE
SOFTWARE
#include <Servo.h>
#include <NewPing.h>
// Motor A pins (enableA = enable motor, pinA1 = forward, pinA2 = backward)
int enableA = 3;
int pinA1 = 6;
int pinA2 = 7;
//Motor B pins (enabledB = enable motor, pinB2 = forward, pinB2 = backward)
int enableB = 5;
int pinB1 = 8;
int pinB2 = 9;
#define TRIGGER_PIN A0 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN A1 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 25 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 23;
int distance = 0;
int stepsize = 5;
int detect = 0;
void setup() {
Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results.
pinMode(enableA, OUTPUT);
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(enableB, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
myservo.attach(10); // attaches the servo on pin 10 to the servo object
myservo.write(pos);
}
void loop() {
enableMotors();
analogWrite(enableA, 225); // ปรับความเร็วหุ่นยนต์
analogWrite(enableB, 225); // ปรับความเร็วหุ่นยนต์
delay(30); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
unsigned int uS = sonar.ping();
// Send ping, get ping time in microseconds (uS).
distance = uS / US_ROUNDTRIP_CM;
if (distance <= 6) {
// nothing detected
detect = 0;
// move left
turnLeft(100);
forward(1);
pos = pos + stepsize;
myservo.write(pos);
if (pos > 200) {
pos = 200;
}
}
else {
// something is detected
detect = 1;
// move right
turnRight(100);
forward(1);
pos = pos - stepsize;
myservo.write(pos);
if (pos < 20) {
pos = 20;
}
}
Serial.print(detect);
Serial.print(", ");
Serial.print(pos);
Serial.print(", ");
Serial.println(distance);
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
digitalWrite(enableA, HIGH);
}
void motorBOn()
{
digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
digitalWrite(enableB, LOW);
}
void motorBOff()
{
digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
#include <NewPing.h>
// Motor A pins (enableA = enable motor, pinA1 = forward, pinA2 = backward)
int enableA = 3;
int pinA1 = 6;
int pinA2 = 7;
//Motor B pins (enabledB = enable motor, pinB2 = forward, pinB2 = backward)
int enableB = 5;
int pinB1 = 8;
int pinB2 = 9;
#define TRIGGER_PIN A0 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN A1 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 25 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 23;
int distance = 0;
int stepsize = 5;
int detect = 0;
void setup() {
Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results.
pinMode(enableA, OUTPUT);
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(enableB, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
myservo.attach(10); // attaches the servo on pin 10 to the servo object
myservo.write(pos);
}
void loop() {
enableMotors();
analogWrite(enableA, 225); // ปรับความเร็วหุ่นยนต์
analogWrite(enableB, 225); // ปรับความเร็วหุ่นยนต์
delay(30); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
unsigned int uS = sonar.ping();
// Send ping, get ping time in microseconds (uS).
distance = uS / US_ROUNDTRIP_CM;
if (distance <= 6) {
// nothing detected
detect = 0;
// move left
turnLeft(100);
forward(1);
pos = pos + stepsize;
myservo.write(pos);
if (pos > 200) {
pos = 200;
}
}
else {
// something is detected
detect = 1;
// move right
turnRight(100);
forward(1);
pos = pos - stepsize;
myservo.write(pos);
if (pos < 20) {
pos = 20;
}
}
Serial.print(detect);
Serial.print(", ");
Serial.print(pos);
Serial.print(", ");
Serial.println(distance);
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
digitalWrite(enableA, HIGH);
}
void motorBOn()
{
digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
digitalWrite(enableB, LOW);
}
void motorBOff()
{
digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}


ความคิดเห็น
แสดงความคิดเห็น